壁取付け・インバース スカラロボット YK-XGS
システム設計や作業エリアの自由度が格段に広がり生産設備の縮小に貢献するYK-XGSシリーズの特長をご紹介します。

壁取付け・インバース スカラロボット YK-XGS
従来使えていなかったロボット設置スペースを有効に活用できます。
- アーム長:
300mm~1000mm - 最大可搬質量:
3kg~20kg
特長
01天吊りタイプからリニューアル 完全ベルトレスで高剛性
従来の天吊りタイプから壁取付けにしたことにより、システム設計の自由度が向上。生産設備のダウンサイズを可能にします。また、 上向き操作が可能なインバースタイプもラインナップされているため、作業方向の自由度が広がります。また、完全ベルトレス構造 になったことで、最大可搬質量20kg、R 軸許容慣性モーメントはクラス最大1kgm2 ※を実現。大型ハンドも取付け可能で重荷重作 業に最適です。
- ※
- YK700XGS ~ YK1000XGS

02高剛性・高精度を実現する内部構造
03完全ベルトレス構造
ZR軸ダイレクトカップリング構造により完全ベルトレス構造を実現しました。ベルトレス構造によりロストモーションを大幅に削減。長期間にわたり高精度を維持できます。また、ベルトの破損、伸び、経年劣化の心配をすることなく長期間メンテナンスフリーでご使用いただけます(全てのXGシリーズとYK180X/YK220Xが対象です)。
04高速性
標準サイクルタイムが早いのはもちろんですが、ヤマハは実用域のタクトタイムも重視しています。減速比やモータ最高回転数の見直しにより最高速を大幅に向上。特に長距離移動時のタクトタイム向上に寄与します。
05優れたメンテナンス性
ヤマハスカラロボットYK-XG シリーズはカバーが前にも上にも外せます。カバーはケーブルと独立しているので、メンテナンスが容易です。また、ハーモニックギヤのグリス交換は、ギヤの分解が必要で工数がかかる上、位置ずれが起きる可能性もありますが、ヤマハスカラロボットのハーモニックギヤはグリス封入タイプを採用しているため、グリス交換は不要です。
06驚きの許容慣性モーメント
スカラロボットの性能は、標準サイクルタイムだけでは語れません。実際の使用環境では、重いワークやオフセットの大きなワークも多々あります。その際、R軸許容慣性モーメントが低いと、サイクルタイムが大幅に低下してしまいます。ヤマハスカラロボットは、全て先端回転軸が減速機直結。一般的な減速後にベルトで位置される構造に比べ、R軸許容慣性モーメントが圧倒的に高いため、高速動作が可能です。
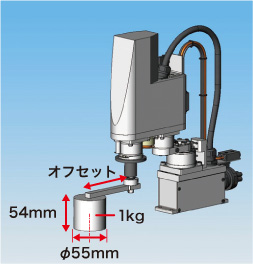
R軸許容慣性モーメント:YK120XGと他社との比較
R軸から負荷重心までのオフセットが大きいとイナーシャが大きくなり、動作時の加速度が制約されます。ヤマハXGシリーズは、他社同等クラスのスカラに比べてR軸の許容慣性モーメントが圧倒的に大きいため、オフセット状態でも高速動作が可能です。
負荷質量1kgの場合(図参照)
07コンパクト
ケーブルレイアウトの変更により、ケーブル高が本体カバーより低くなりました。また、押し出し材ベースと全長の低いモータ採用により、同クラスで最も低い全高を実現しました。
08位置検出器にレゾルバ採用
モータの位置検出にはレゾルバを採用しています。光学式エンコーダのように電子部品の故障などによる検出不良はなく耐久性に大変優れています。
また、アブソリュート仕様、インクリメンタル仕様ともにロボットの仕様は全く同じでコントローラも共通です。そのため、パラメータ設定だけでアブソ仕様にもインクリ仕様にも変更可能です。バッテリーバックアップ期間は1年間ですが、万が一、アブソバッテリが完全に消耗しても、インクリ仕様として動作させることが可能なため、ラインを停止させることがなく安心です。
レゾルバは磁気式位置検出器。電子部品や光学素子のないシンプルな構造で、一般的な光学式エンコーダに比べ、潜在的故障箇所がきわめて少ないのが特長です。高い耐環境性・低い故障率で自動車や航空機など信頼性が重視される分野で数多く使用されています。
09ゾーン制御(=最適加減速自動設定)機能
スカラロボットはアームを畳んだ状態と伸ばした状態ではモータ、減速機にかかる負荷が大きく異なります。
ヤマハスカラロボットは、動作開始時のアーム姿勢と動作終了時のアーム姿勢から、最適な加速度、減速度を自動で選択します。そのため、最初に搬送質量を入力するだけで、モータピークトルクや減速機許容ピークトルクの許容値を超えることはありません。どんなときもモータのパワーをフルに引き出し、高い加減速度を維持します。
- ※
- モータトルクがピーク値を超えると制御性に悪影響を及ぼしたり、機械振動が起きたりします。また、減速機許容ピークトルク値を超えるとロボットの早期破壊や、寿命の大幅な低下を招きます。
10中空中通しシャフト&ツールフランジオプションが選択可能
先端ツールへの配線が容易となる中空中通しシャフト、ツール取付けのためのツールフランジをそれぞれオプションでご用意いたしました。
- ※
- 対応機種は各機種の詳細ページをご参照ください。

11ヤマハスカラロボットは30年以上の歴史
ヤマハロボットはスカラから始まりました。
1979年、最初に製造したスカラロボット「CAME」以来、30年間一貫してスカラの開発を続けています。市場で鍛えられ、改良に改良を重ねた長い実績がヤマハスカラロボットのバックボーンです。

各種資料製品に関するカタログ等をご覧いただけます。
壁取付け・インバース スカラロボット YK-XGS
関連コンテンツ



ロボティクス事業部 営業統括部 FA営業部・CS部
〒433-8103 静岡県浜松市中央区豊岡町127番地
TEL:053-525-8350(営業)/ 053-525-8160(CS)
FAX:053-525-8378
GW休業のご案内
誠に勝手ながら2024年4月27日(土)~2024年5月5日(日)をGW休業とさせていただきます。
| 4/27 土 |
4/28 日 |
4/29 月 |
4/30 火 |
5/1 水 |
5/2 木 |
5/3 金 |
5/4 土 |
5/5 日 |
|---|---|---|---|---|---|---|---|---|
| ― | ― | ― | ○ | ○ | ― | ― | ― | ― |