テクノロジー
ヤマハ車椅子用電動ユニット、電動アシストユニットの技術についてご説明します。
「手動」と「電動」の長所を併せ持つ新しい車椅子の世界を実現する、というコンセプトで開発を行ったJWシリーズには、従来の電動車椅子とは異なる、独自開発の新しい技術や、ヤマハ発動機がロボットや電動アシスト自転車、電動スクーターなどで培った技術が応用されています。
JW-I、JWX-1、JWX-1 PLUS+(車椅子用電動ユニット)の技術
より多くの車椅子に取り付け可能な構造

手動車椅子の車輪を取り替えるだけで電動化することが出来ます。駆動部分には減速機構、クラッチ機構、 モーターを内蔵。さらに電装系部品類、バッテリーも駆動ユニットに装備。より多くの車椅子に装着可能です。
●軽量・コンパクト化の工夫

●モーター部分
手動車椅子の大きなメリットである軽量・コンパクトさを生かすため、JW-I、IIの動力系では、モーターに高効率で機器の小型、軽量化に対して非常に使いやすいといわれている希土類磁石の直流モーターを採用、JWX-1では電動スクーターパッソルに使われている超扁平面対向型ACサーボモーターを採用し、軽量コンパクトかつ高効率、低騒音を実現。車椅子フレームへの装着性もさらに高まりました。

●小型軽量バッテリー
車椅子ユーザーの1日当たりの行動半径が平均2km程度という使用実態を踏まえ、バッテリーには従来の大型鉛バッテリーではなく、急速充電にも対応する小型軽量ニッケル水素バッテリーを採用しています。
簡単な操作で滑らかな走行性能
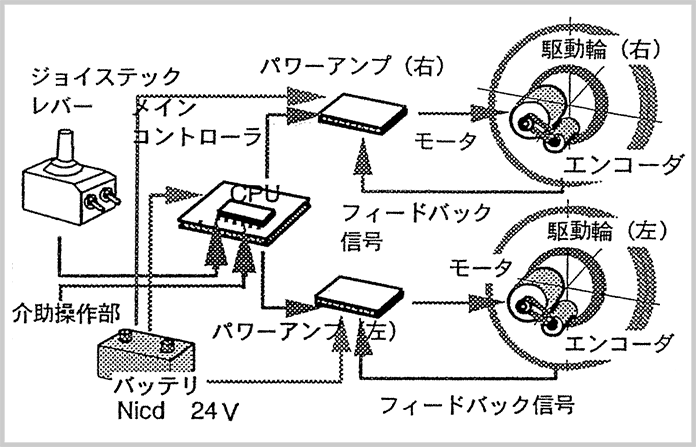
JW-I、JWX-1は2モーターによる2輪駆動方式。左右各輪の速度を個別に制御することで前後進、旋回の動作を行っています。操作はジョイスティック1本。各輪には回転センサーを備えフィードバック制御を行っていますので、超微速から力強く安定した走行もできます。旋回の機動性とショックの少ない滑らかな走行性により初心者でも簡単に実用走行が可能です。
ジョイスティック操作の情報や駆動輪からのフィードバック情報の処理などの機能はすべてメインコントローラ内のCPUによってデジタル的に制御されています。 室内走行など狭い場所での使用やジョイスティック操作時の微速操縦性、 旋回性、上肢の支持が充分にできないユーザーのための発進加減速性などについては、 試乗会やモニター評価などのフィールドテストで得た情報をもとに、 この制御システムをきめ細かく設定し、滑らかな走行性能を実現しています。
JW-II、JWX-2(車椅子用電動アシストユニット)の技術
JW-II、JWX-2では、車椅子への装着性や軽量・コンパクトという面ではJW-Iと同様の取り組みがなされていますが、パワー・アシスト・システムを車椅子に採用するという前例のない取り組みのために、実用化に向けては独自の様々な新しい工夫や技術を取り入れています。
JW-II、JWX-2のパワー・アシスト・システム(P.A.S.)
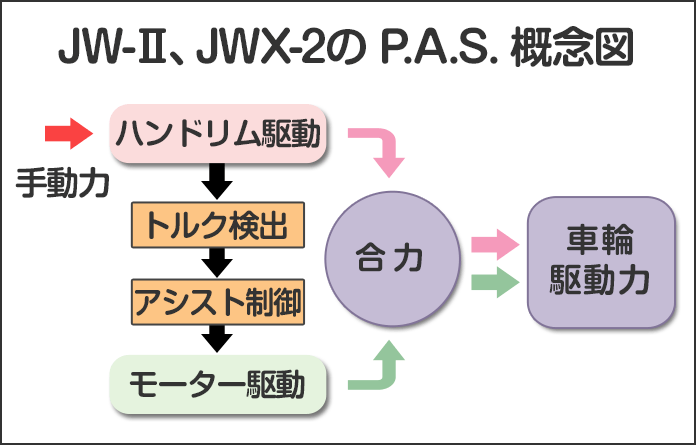
車椅子のハンドリムを漕ぐ力とそれに応じて出力されるモーターの力を融合して車輪を回し、車椅子をラクに動かす仕組みがJW-II、JWX-2(車椅子用電動アシストユニット)のパワー・アシスト・システム(P.A.S.)です。これはまさに電動アシスト自転車PAS(パス)の技術を車椅子に応用したものです。
パワー・アシスト・システムは、ハンドリムを動かす手動の力と現在の走行スピードの情報を基に、コンピューターが瞬時に演算した、その時点の走行状況に合った最適なアシスト力を「電動モーター」が駆動輪に伝え、ハンドリムを動かす力の負荷を軽減させるシステムです。発進時や坂道など負荷の大きな状況では自動的に大きなアシスト力が出力されます。駆動輪が一つの自転車に対し、JW-II、JWX-2では左右の車輪がそれぞれ独立したシステムを持っているため、それぞれのコンピューターが自輪の制御を行うとともに相手輪と必要な情報を交換しています。
模擬惰行機能
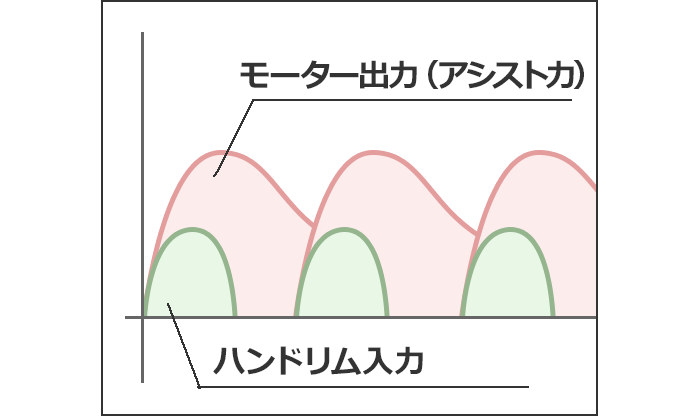
自転車と異なり、車椅子ではハンドリムを手で漕ぐ操作は間欠的となります。手を持ち替えるとき車椅子は慣性により走行するものの、登り坂ではハンドリムに力が加わっていない間に車椅子が後退してしまい、安定した走行ができません。
そこでJW-II、JWX-2では制御技術を用いて慣性走行を模擬させるようにしました。つまりハンドリムに人の力が加わっている時にはモーターはアシスト分の力を出力し、人の力が加わっていない時にもこの出力を保持、かつ時間的にアシスト力を減衰する特性にしたのです。
これを模擬惰行機能と呼んでいます。この機能により平らな道を走る時はスムーズな走行を、登り坂では車椅子の後退を阻止して力強い走行を実現しています。