電磁誘導式とは
設定されたコースを自動走行する電磁誘導式についてご紹介します。

定められたコースを安全に自動運転する〈電磁誘導式〉の仕組みやその性能をご紹介します。
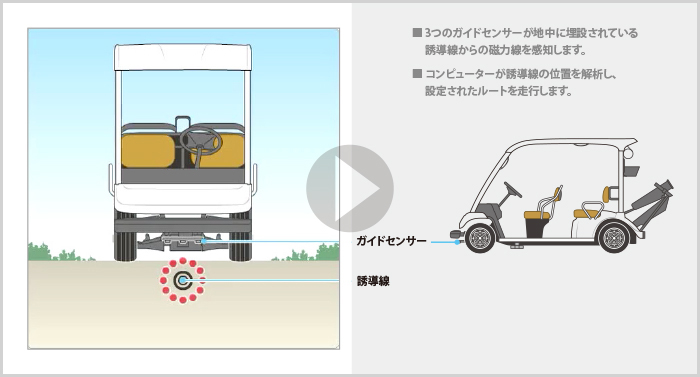
- 決められたルートを走行する仕組み
- 地中に埋設されている誘導線からの磁力線を感知し、設定されたルートを走行します。
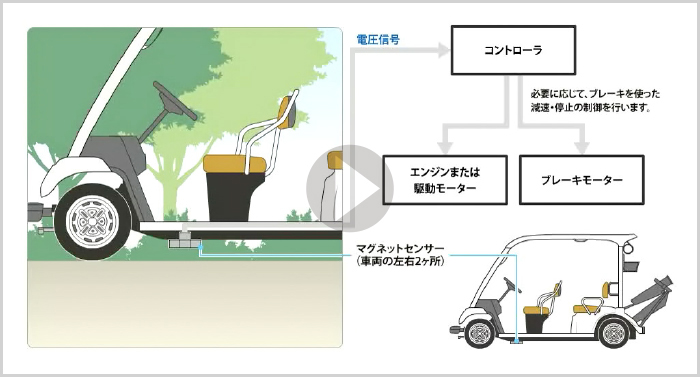
- 自動動作制御の仕組み
- 埋設された「マグネット」の上を走行すると、車両の「マグネットセンサー」に電圧が発生し、その信号をコンピューターが解析して車両の動作を制御します。

- 衝突防止センサー
- 衝突防止センサーのシグナルを後方車両に向けて発信。後方を走行中のランドカーはその信号の感知後、自動的に停止します。

- 停車するべき場所での自動停止
- 走行ルートにあらかじめマグネットを埋設することで、ランドカーに前方に停車するべき場所があることを伝えます。ランドカーのマグネットセンサーが信号を感知すると停車地点で自動停止します。
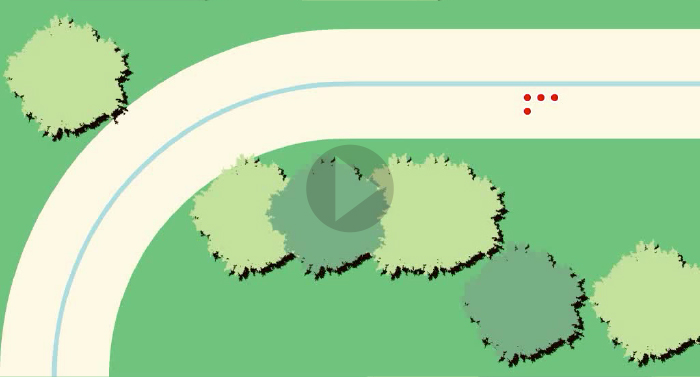
- 自動 増速/減速
- 走行ルートにあらかじめマグネットを埋設して、ランドカーに前方にカーブなどがあることを伝えます。ランドカーのマグネットセンサーが信号を感知するとゆるやかに増速/減速します。
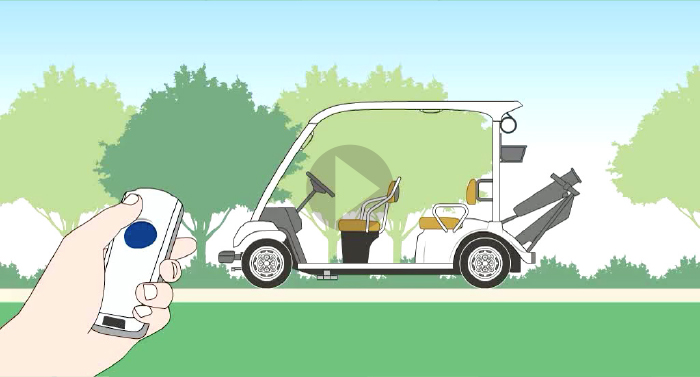
- リモートコントローラでの発進/停止操作
- リモートコントローラを使うことで、ランドカーから約80m離れた場所から発進/停止の操作ができます。


安全にお乗りいただくために
以下のような場合、事故につながったり、ケガをしたり、車を破損する場合があります。
- 正面同士の場合、センサーによる追突防止制御はできません。
- カート側面に接近する場合、センサーによる追突防止制御はできません。
- カーブで停車している時は、センサーによる追突防止制御が効かない場合があります。