単軸ロボットポジショナ EP-01
産業用Ethernetの導入ハードルを低減。低価格で使いやすいRobonityシリーズ「ABAS/ABAR/ABFS/AGXS/AGFS/AGBS」専用ロボットポジショナ。

EP-01
プログラム不要!ポイントトレースのみのポジショナタイプ
- 対応ロボット:
Robonityシリーズ ABAS / ABAR / ABFS / AGXS / AGFS / AGBS - CEマーキング対応:
○ - フィールドネットワーク対応:
EtherNet/IP、PROFINET、EtherCAT、CC-Link - 運転方法:
ポイントトレース、リモートコマンド、オンライン命令 - ポイント数:
255ポイント - 入力電源:
単相AC200~230V±10% - 原点復帰方式:
アブソリュート
特長
01ハイコストパフォーマンスモデル
産業用Ethernetの導入ハードル低減。低価格で使いやすい!を実現
ロボットポジショナ「EP-01」は、業界でシェア拡大中の産業用Ethernetを軸に設計を大幅に見直すことで、低価格化を実現しました。
これにより、各種産業用EthernetのフィールドネットワークをパラレルI/O(NPN仕様)と同価格でご提供することが可能となり、お客様の産業用Ethernetの導入ハードルを一気に引き下げます。
また、低価格ながら、Ethernetの標準装備やフィードバックパルス出力、直値制御の機能拡張、リアルタイム出力など従来機種に比べ大幅に機能を拡張しており、コストパフォーマンスに大変優れたコントローラです。
お客様の設備全体の原価低減に貢献します。
[対応省配線フィールドネットワーク]




02ヤマハが誇る高い信頼性 安心して長くご使用いただくために
低価格ながらも、長期間の使用を想定した製品設計を行っています。
YAMAHA独自の厳しい評価基準で評価を行っているため、安心して長くご使用いただけます。
開発者の声
単軸コントローラという『シンプル』な機能だからこそ『しつこく、こだわって』作りました。低価格と使いやすさを両立するため、設計を根本から見直し、お客様に長く安心してご使用いただけるよう、物が壊れるまで徹底的に評価を繰り返し開発を進めました。また、デザインも刷新し小型化を図りながらも直感的なインターフェースを採用したことにより、お客様の作業性向上を図りましたので、ぜひお試しください。
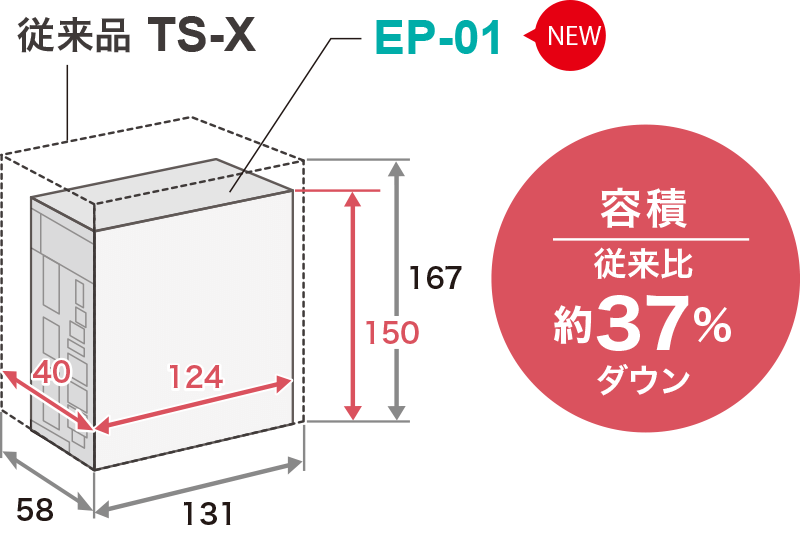
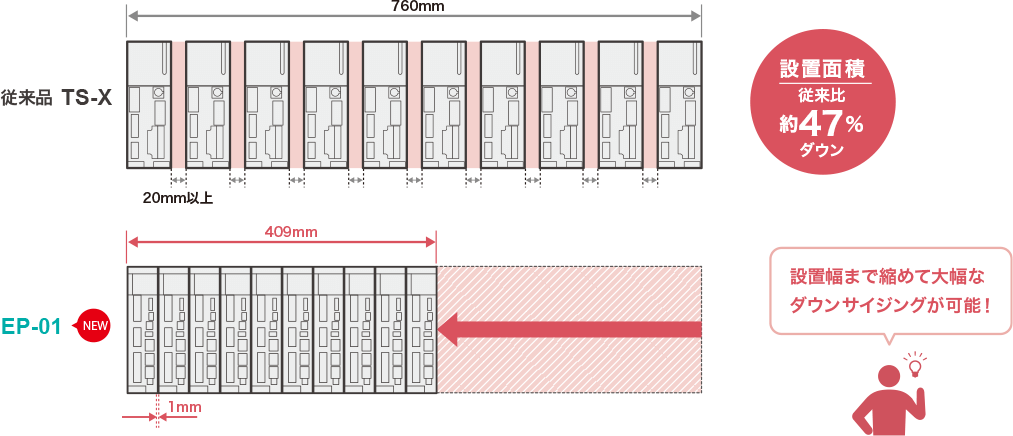
03面積生産性の向上 業界トップクラスの小型化
コンパクト設計のため、設備のダウンサイジングが可能です。
Basicモデル(ABAS)
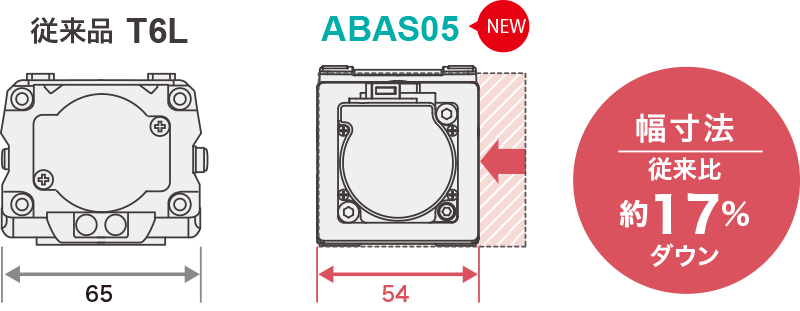
ロボットポジショナ EP-01
設置面積比較
04ユーザビリティを求めて 立ち上げに関するわずらわしさを軽減
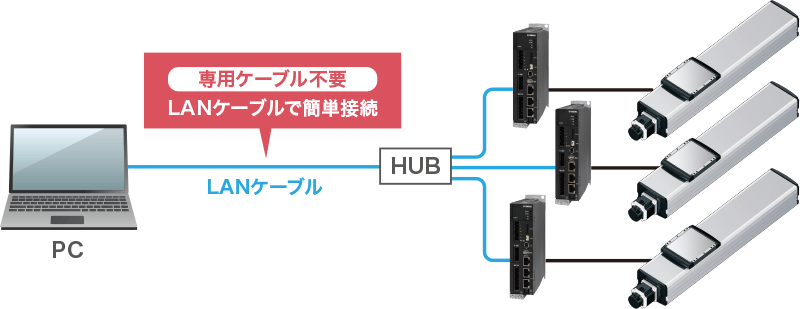
コントローラ本体にEthernetポートを標準装備しているため、従来必要だったPC接続用の専用通信ケーブルは不要です。
立ち上げに関するわずらわしさを軽減し、お客様の立ち上げ工数を削減します。
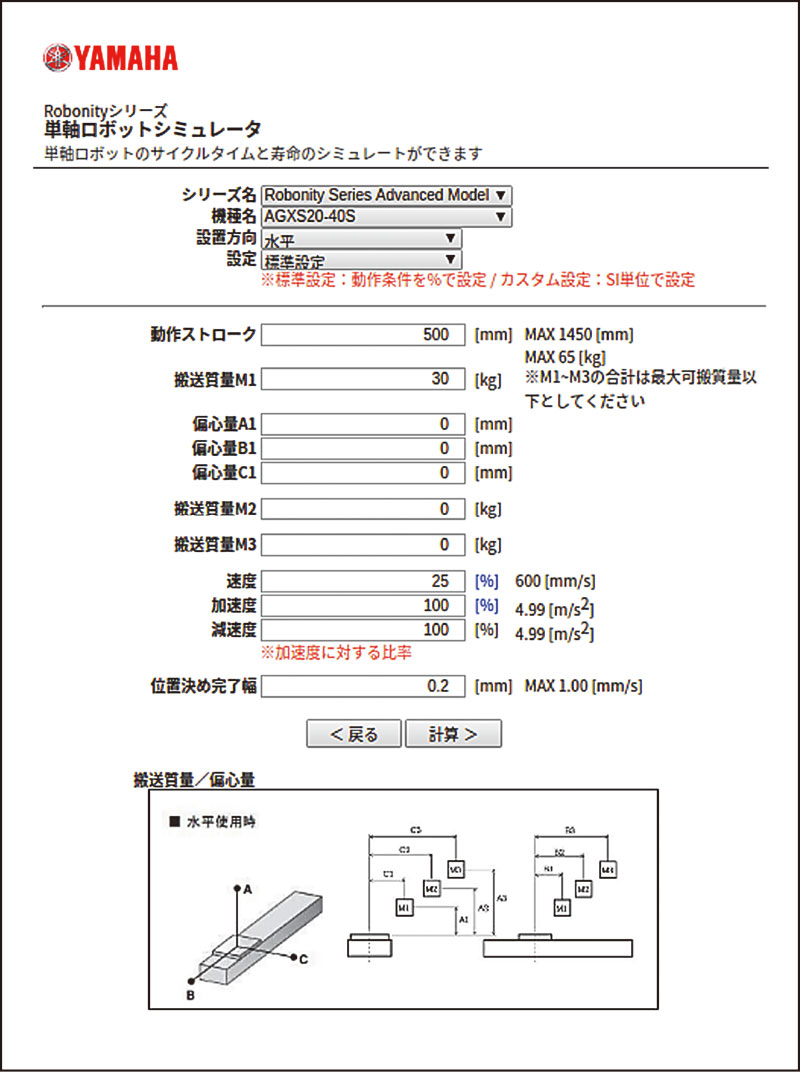
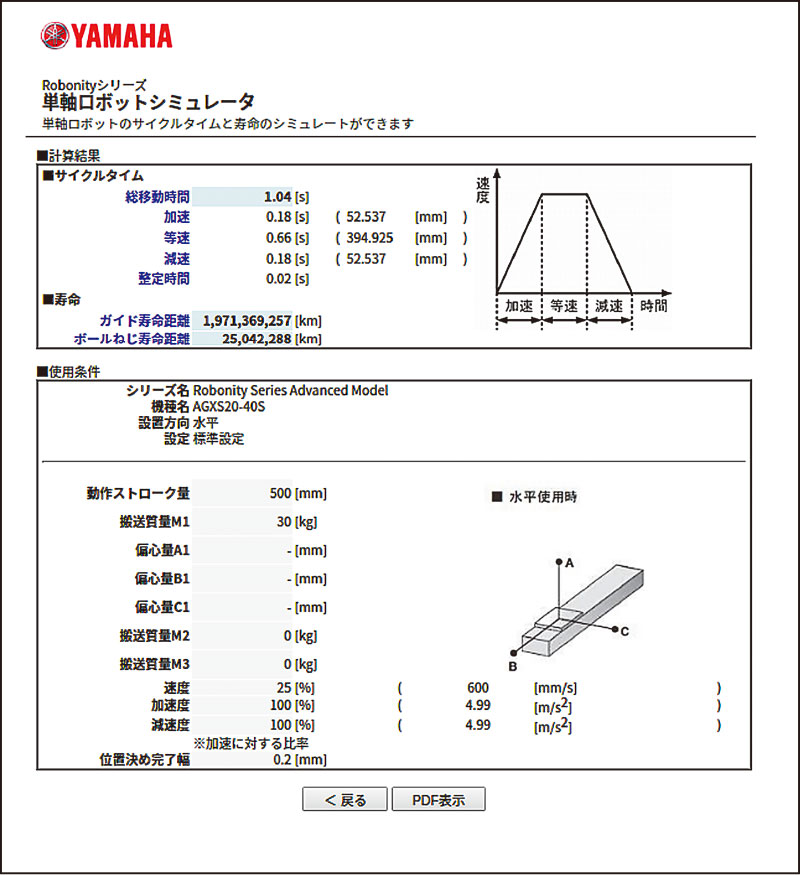
05選定がラク タクトと寿命がすぐにわかる
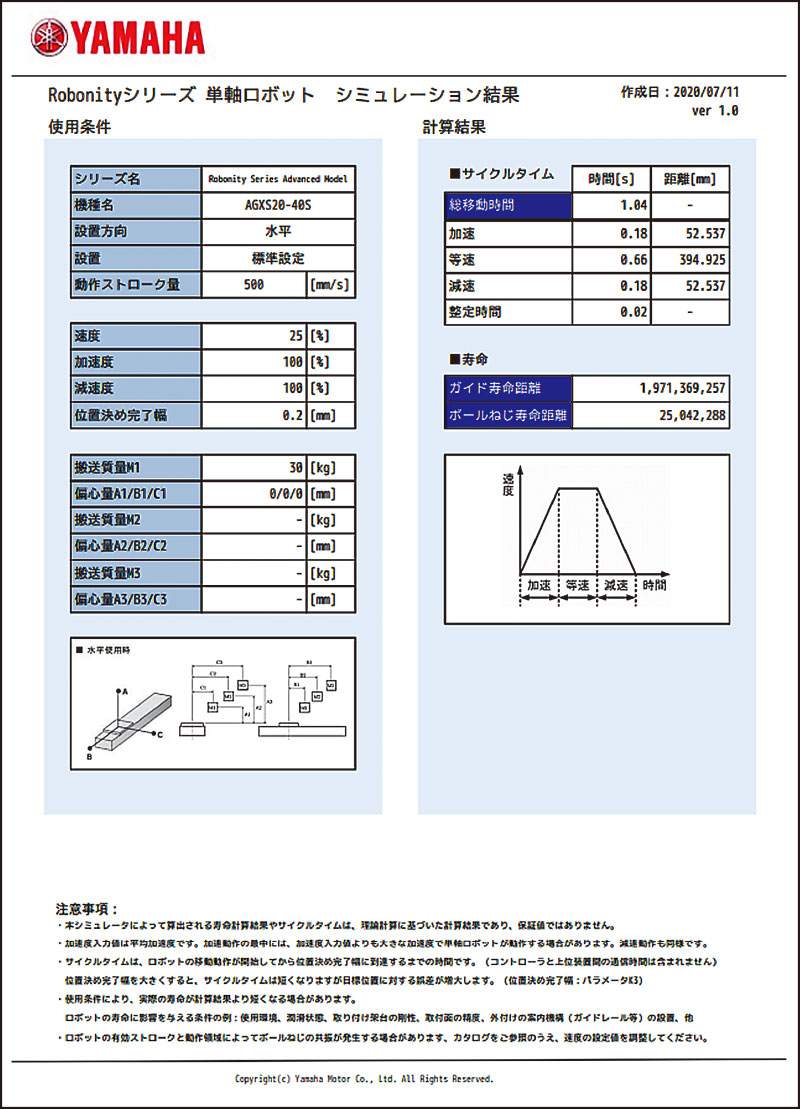
WEBサイトで必要事項を簡単入力するだけで寿命計算とサイクルタイムの計算が同時に行えます。 PDFで保存もでき大変便利です。
入力画面
結果
PDF 簡単に保存可能!
06安定稼働を目指して ライン停止からの早期復旧に貢献
バッテリレスアブソ
バッテリレスアブソ方式に対応しているためバッテリ交換が不要です。
カレンダー機能
内部に時刻情報を持ち、アラーム発生時刻などが取得できます。時刻情報は電源を遮断していても1年以上保持されるため、長期連休明けでも再設定のわずらわしさがありません。
アブソバッテリを
ケーブル部に取付け
バッテリ有りの仕様の場合でも、アブソバッテリがケーブル部への取り付けになるため、コントローラを交換した際アブソデータが保持されます。

07産業用Ethernetでワンランク上の設備に リアルタイム出力機能でロボットの状態監視
ロボットのコンディション確認やメンテナンス時期の目安に役立ちます。
- 現在位置
- 現在速度
- モータ電流
- アラーム発生時のアラームコード
- 過負荷積算比率(100%でオーバーロード発生)
- 移動距離(サーボオン時)
- 移動時間(サーボオン時)
- モータ負荷率
08幅広いニーズにお応えできるように 機能拡張、新機能でより幅広い用途でお使いいただけます
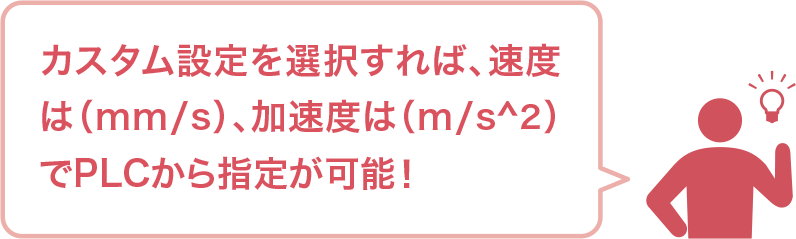
PLCからの位置決め運転コマンドに加速度、減速度の指定タイプを追加しました。
| 直値位置指定 | 位置データ | 速度 | 加速度 | 減速度 |
|---|---|---|---|---|
| データ指定タイプ1 | ○ | |||
| データ指定タイプ2 | ○ | ○ | ||
| データ指定タイプ3 | ○ | ○ | ○ | ○ |
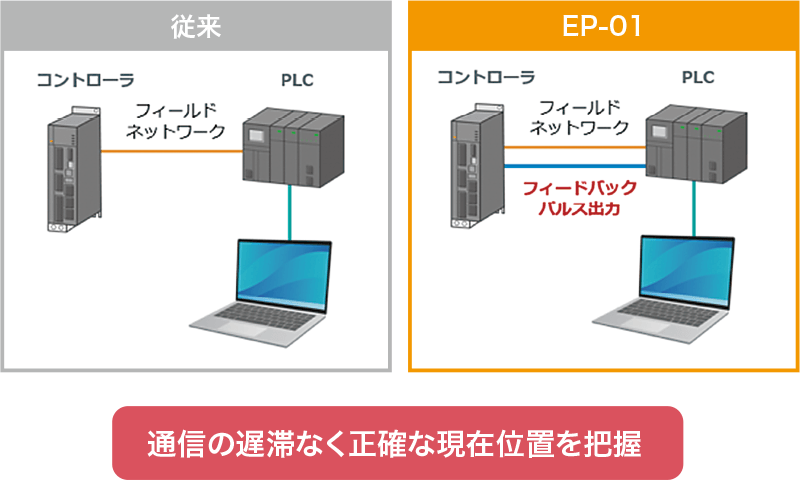
フィードバックパルス機能を追加し、外部機器と連動した使い方も可能です。
フィードバックパルス出力
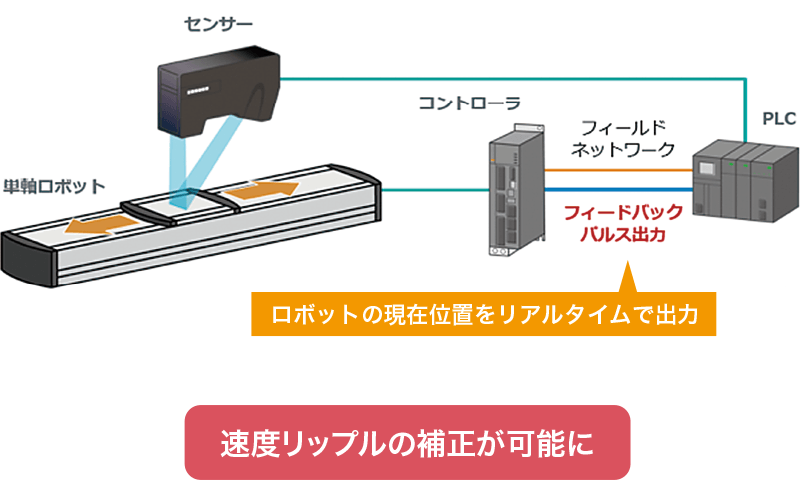
フィードバックパルス出力使用例
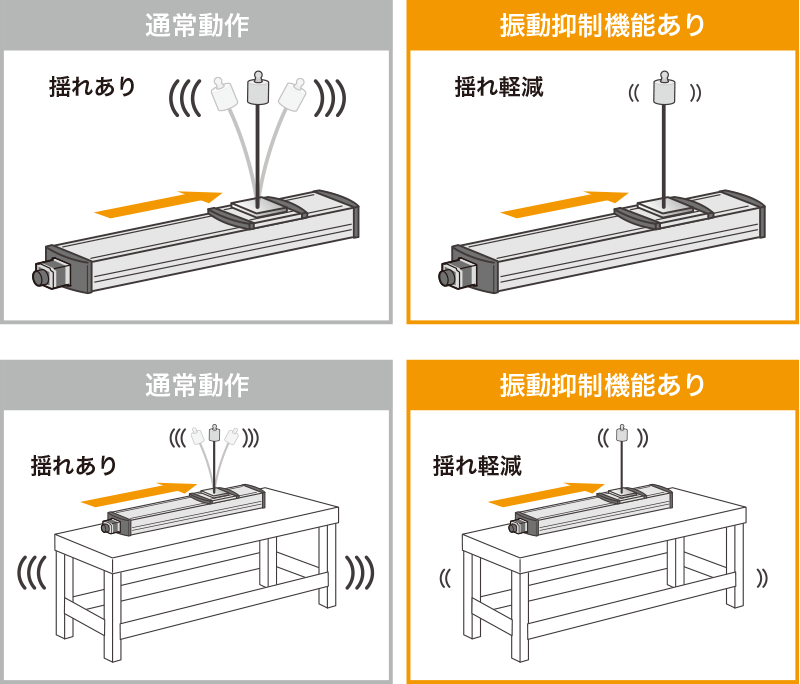
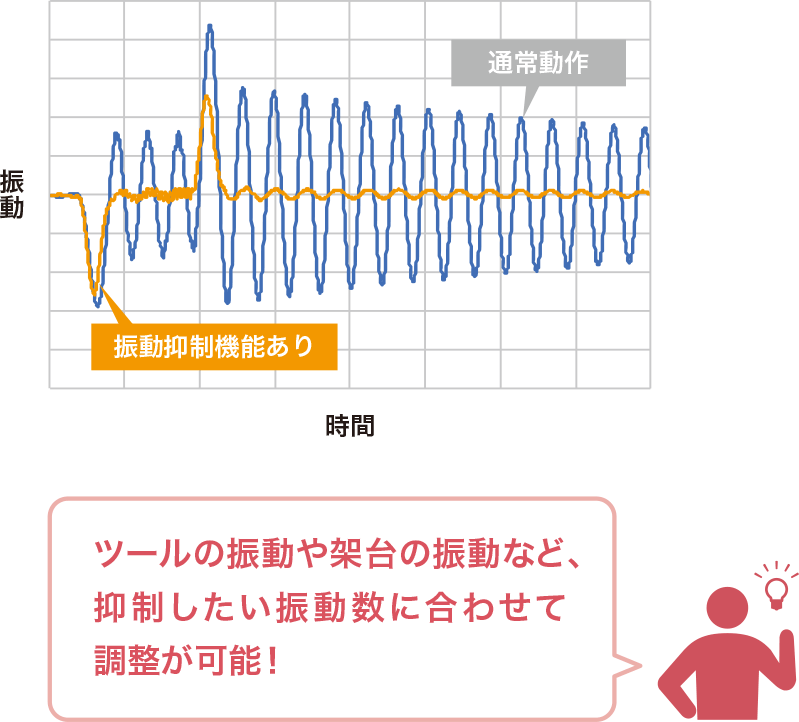
新たに振動抑制機能を追加し、振動抑制を実現!
各種資料製品に関するカタログ等をご覧いただけます。
単軸ロボットポジショナ EP-01
関連コンテンツ




ロボティクス事業部 営業統括部 FA営業部・CS部
〒433-8103 静岡県浜松市中央区豊岡町127番地
TEL:053-525-8350(営業)/ 053-525-8160(CS)
FAX:053-525-8378
夏季休業のご案内
誠に勝手ながら2026年8月8日(土)~2026年8月16日(日)を夏季休業とさせていただきます。
| 8/8 土 |
8/9 日 |
8/10 月 |
8/11 火 |
8/12 水 |
8/13 木 |
8/14 金 |
8/15 土 |
8/16 日 |
|---|---|---|---|---|---|---|---|---|
| ― | ― | ○ | ― | ○ | ― | ― | ― | ― |
※8/10,8/12は故障・異常に関するお問い合せのみ、お電話にて対応いたします。
※上記対応時間外においては、053-525-7321(トラブル受付専用ダイヤル)にてトラブル受付のみ実施しております。
※8/17の受付時間は 8:00~17:00、17:30~19:45 です。(操作に関するお問い合せは9:00より受付)