多軸コントローラ RCX340、RCX341
多軸コントローラRCX340、RCX341をご紹介します。

多軸コントローラ RCX340
2001年にRCXコントローラ0(ゼロ)ジェネレーションとも呼べるRCX40が発売されてから14年。RCXコントローラの機能をさらに向上させるため、全ての機能を見直し、ついにRCXコントローラの3rdジェネレーション「RCX340」が誕生しました。
- 運転方法:
プログラム、リモートコマンド、オンライン命令 - ポイント数:
30000ポイント - 入力電源:
単相AC200V~230V±10%以内 - 原点復帰方式:
アブソリュート、インクリメンタル、セミアブソ
特長
01ハイレベルな設備構築が実現できる高度な機能性
高速通信により複数台ロボットの同期動作が可能になりました。
コントローラ間リンクによりプログラムは一台のコントローラに記載するだけでOK。
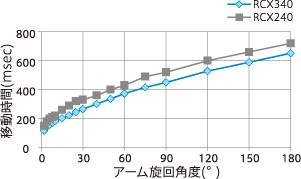
新開発のアルゴリズムにより、位置決め時間の短縮や軌跡精度の向上も達成しました。
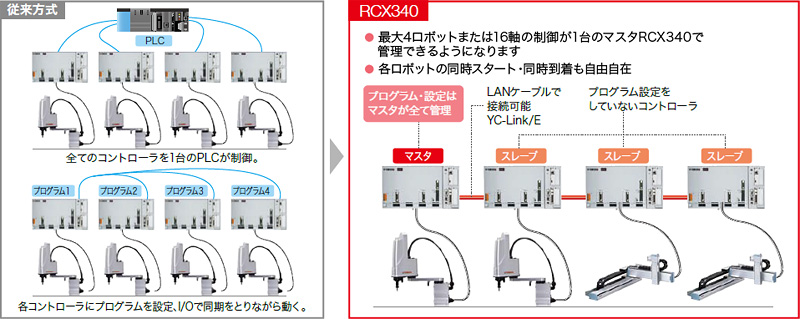
複数台のロボットの制御を一台のマスタコントローラで管理可能
RCX340コントローラは、コントローラ間の高速通信が可能となりました。マスタコントローラから各スレーブのコントローラに動作指令を 出せるようになったため、プログラムやポイントは上位のマスタコントローラのみを管理するだけでOKです。また、マルチタスクにも柔軟に対応しているため、PLCを使うやり取りも簡素化できます。各ロボットの同時スタート、同時到着も自由自在。多くの軸を使用した複雑かつ精密なロボットシステムをより簡単に低コストにて構築可能です。
モーション機能の大幅改善によるなめらかな動きの実現
新サーボ・モーションエンジン搭載により、さまざまな動作の連結が可能になりました。
新開発のアルゴリズムにより、位置決め時間の短縮や軌跡精度の向上を達成しました。
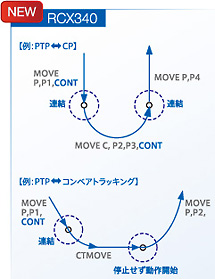
CONTオプションの機能拡張
PTPと補間動作、コンベアトラッキングなど、異種動作の連結により高速化が図れます。
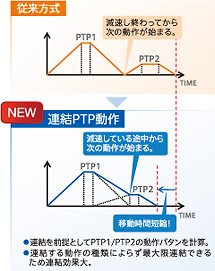
動作速度の向上
連結PTPを使用するとすべての動作を可能な限り連結。加減速時間が異なる動作も動作時間を優先して最大限に連結するため、移動時間を大幅に短縮することができます。
用途による使い分け
連続動作をさせる場合、シーリングなど一定速度で動作させる場合は従来からあるPATH、移動時間を優先する場合は連結PTPと、用途に適した動作を選択可能です。

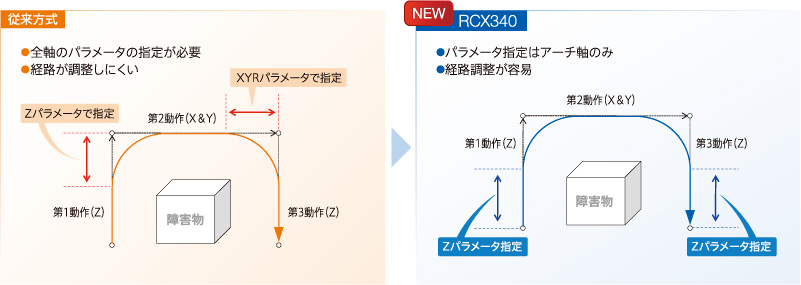
より直感的なアーチモーションの指定が可能
アーチモーションの経路指定の方法を変更することにより、指定方法が簡素化したうえ、より直感的な指定が可能となりました。
自由な軸構成により、多種多様なアプリケーションに対応可能
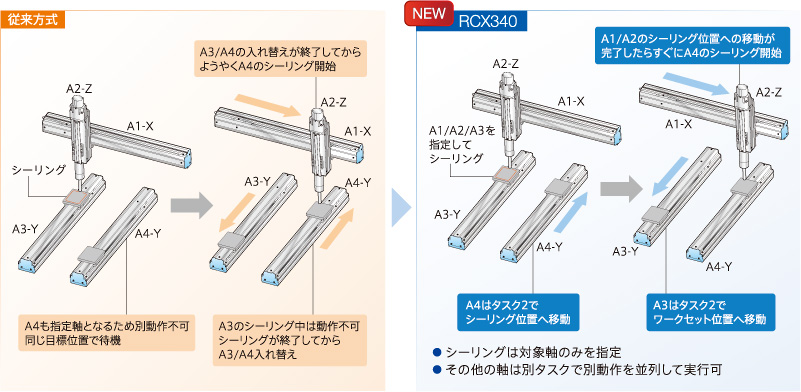
例:デュアルレーンでの補間動作
マルチ座標軸設定とCPコマンドの軸指定対応により、デュアルレーンでの補間動作なども可能になりました。同座標属性の軸が複数あるロボットの大幅なサイクルタイム短縮を実現できます。
例:4軸ディスペンサーロボット A1-X/A2-Z/A3-Y/A4-Y
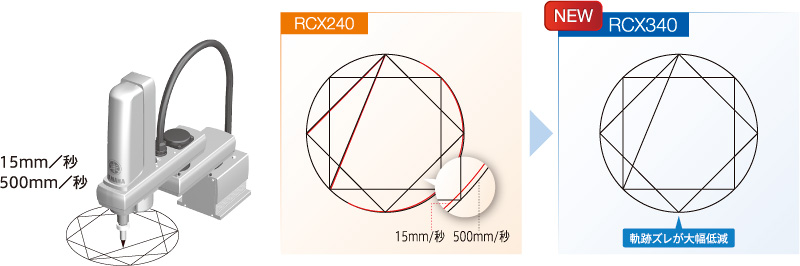
軌跡精度の向上
サーボアナライズ機能による可視化と、機能による高応答化により、従来機種と比較し軌跡精度が向ました。
02レベルアップした基本性能
ロボット言語、マルチタスク、シーケンス機能、通信、フィールドバスなどの機能をさらに使いやすく向上させました。
モーションの最適化
ロボットの性能を最大限に引き出すため、動作パターンに合わせたモーションの最適化をさらに強化しました。
動作タイムの短縮や停止時の振動抑制など、より質の高いロボット動作を実現します。
最適な加減速モーション
振動を抑えつつ高速な動作ができる加減速モーションを生成します。
コンパクト設計
外寸は約355mm(W)×195mm(H)×130mm(D)。従来の4軸コントローラと比較して体積比約85%と小型化を実現し、制御盤内への設置を容易にしました。

サイクルタイムの向上
YK-XG シリーズで高速化を実現しました。
例:YK400XG
標準サイクルタイム動作 0.49sec → 0.45sec
ユーザーメモリ容量アップ
ポイント数の大幅増加
プログラムとポイントの合計容量
回生ユニットが内蔵
回生抵抗(RGU3 相当)が内蔵されているため既存のロボットと接続する場合、追加の回生ユニットは不要です。
視認性・操作性が向上したサポートツール サポートソフト「RCX-Studio 2020」
プログラムデバック機能を強化し、マルチタスクにも対応しています。
使いやすい操作性、プログラム入力支援機能により、すばやいセットアップが可能です。
新プログラミングボックスPBX
「日本語」「英語」「中国語」の3言語に対応。
カラーディスプレイにより視認性が向上しました。
機能追加・修正作業が簡単になり、プログラミング知識が無い方でも操作可能です。
USBメモリにコントローラデータを保存する機能も搭載しています。

03一段と充実した拡張性
RS232CとEthernetポートを標準で装備。オプションでCC-Link、DeviceNet™に加え、EtherNet/IP™、EtherCATといった高速・大容量の幅広いフィールドネットワークに対応します。
他社コントローラとの連結や、他社VISIONとの連結も容易で、RCX340はまさに“つながるコントローラ”と呼べるでしょう。

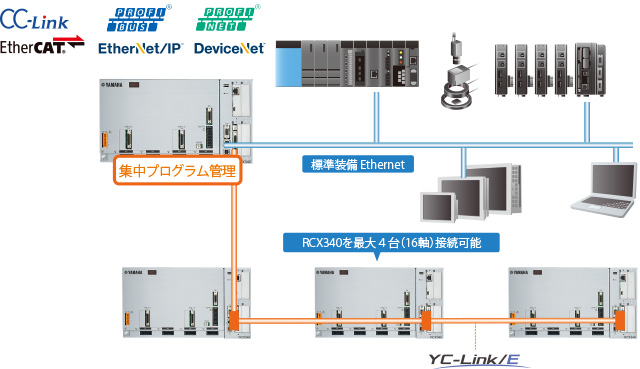
多彩なフィールドバスに対応/ 最大4台接続でロボットを集中管理
RS-232C、Ethernet ポートを標準で装備。そのほかCC-Link、EtherNet/IP™、DeviceNet™、Profibus、PROFINET※1、EtherCATなど充実したフィールドバスに対応可能で、多種多様なデバイスとの接続、制御を行うことができます。5軸以上の場合、YC-Link/Eを使うことでRCX340 コントローラを最大4台接続できるので、複数台のロボットを集中管理できます。またYC-Link/E※2を使用すると、複数台のロボットをあたかも1つのコントローラで動かしているように扱うことが可能なため、ロボットのプログラム作成や管理が非常にラクに行えます。そのためセットアップに費やす人件費などの見えないコストの削減に貢献します。
- ※1
- PROFINET Ver.2,2 に対応
- ※2
- YC-Link/Eをご注文の際はどのロボットを何台目のコントローラに接続するかをご指定ください。
各種資料製品に関するカタログ等をご覧いただけます。
多軸コントローラ RCX340、RCX341
関連コンテンツ




ロボティクス事業部 営業統括部 FA営業部・CS部
〒433-8103 静岡県浜松市中央区豊岡町127番地
TEL:053-525-8350(営業)/ 053-525-8160(CS)
FAX:053-525-8378
夏季休業のご案内
誠に勝手ながら2026年8月8日(土)~2026年8月16日(日)を夏季休業とさせていただきます。
| 8/8 土 |
8/9 日 |
8/10 月 |
8/11 火 |
8/12 水 |
8/13 木 |
8/14 金 |
8/15 土 |
8/16 日 |
|---|---|---|---|---|---|---|---|---|
| ― | ― | ○ | ― | ○ | ― | ― | ― | ― |
※8/10,8/12は故障・異常に関するお問い合せのみ、お電話にて対応いたします。
※上記対応時間外においては、053-525-7321(トラブル受付専用ダイヤル)にてトラブル受付のみ実施しております。
※8/17の受付時間は 8:00~17:00、17:30~19:45 です。(操作に関するお問い合せは9:00より受付)