YHXスタンダードプロファイル:YHXコントローラ
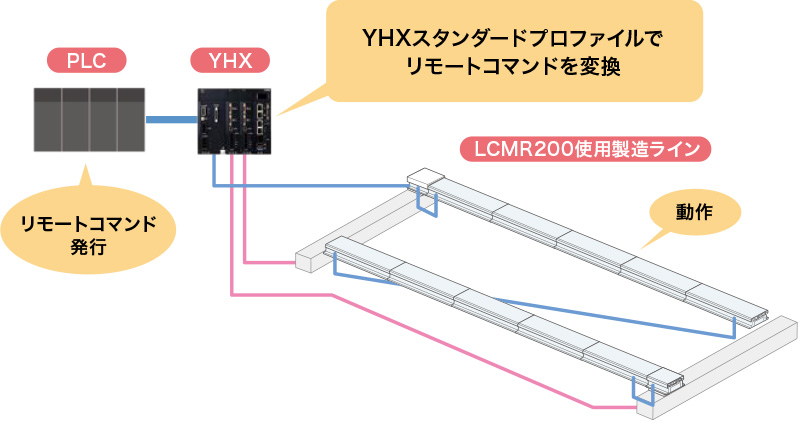
スタンダードプロファイルは、上位PLCからフィールドネットワークを介して単軸ロボットやLCMR200をポジショナとして動かすLCMR200のためのプロジェクトファイルです。
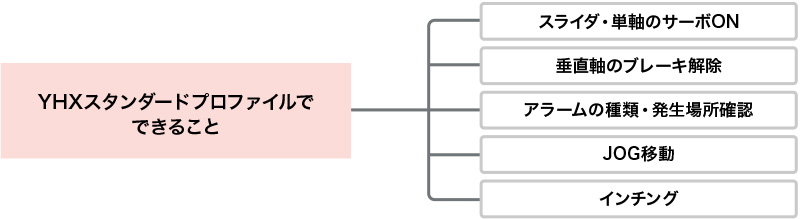
YHXスタンダードプロファイル特長
- お客様によるYHXのラダーの作成が不要
- ペンダントで可能な操作の追加
- シンプルな直値動作とポイント指定移動が可能
- 指定スライダの個別サーボオンが可能
- 上位 PLC からアラーム情報を容易に取得可能

01使い慣れたPLCでLCMR200を動作可能
YHXスタンダードプロファイルを用いることで、各フィールドワークのI/Oインターフェースを介して、PLCなどの上位装置からLCMR200を動作させることができます。
02お客様によるYHXのラダーの作成が不要
専用入出力信号がフィールドネットワークのワードおよびビット領域にあらかじめ割り付けられているので、サーボONやJOG移動などのロボット動作に必要な操作をプログラム作成することなく行えます。
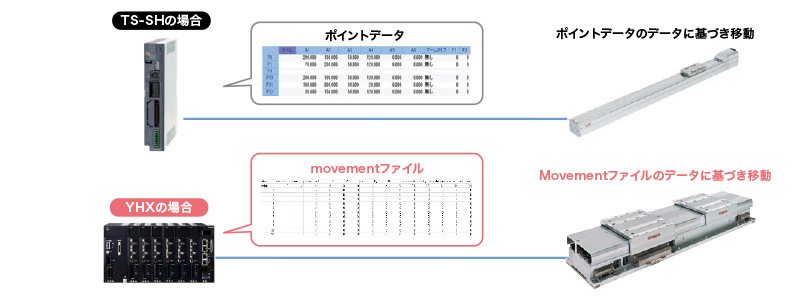
03「movementファイル」を使用して制御
目標位置を登録するためのポイントデータ「movementファイル」を使用して制御を行います。
ポイントデータと近い役割を担うのがmovementファイル
04PLC未接続でもペンダントからジョグやインチング操作が可能
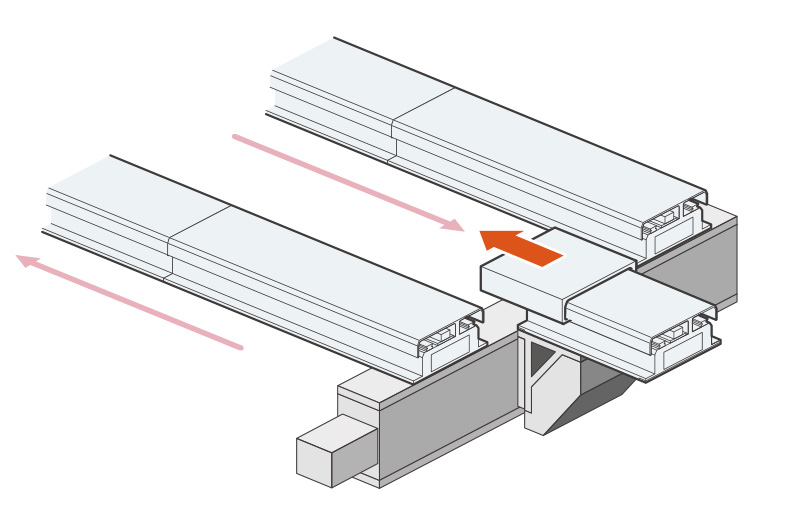
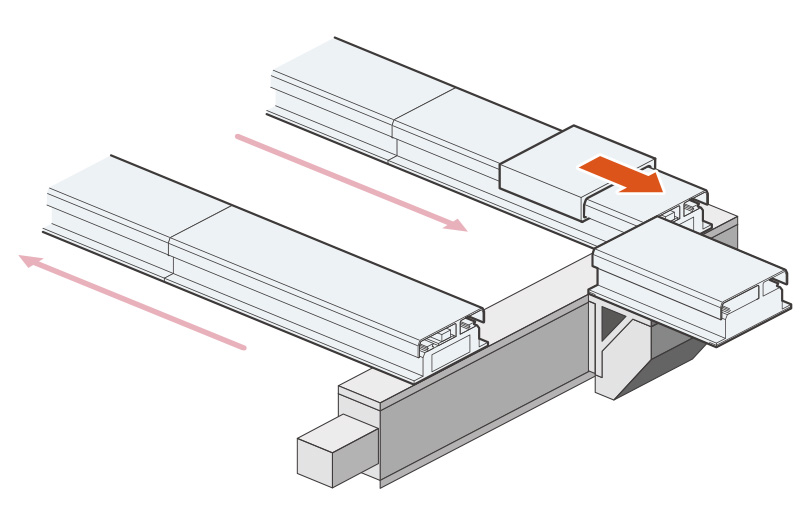
PLCが未接続の状態でも、プログラミングパッドからジョグやインチング操作による軸の動作が可能です。LCMR200を循環レイアウトで使用する場合に必要となる調整作業もすぐに行えます。
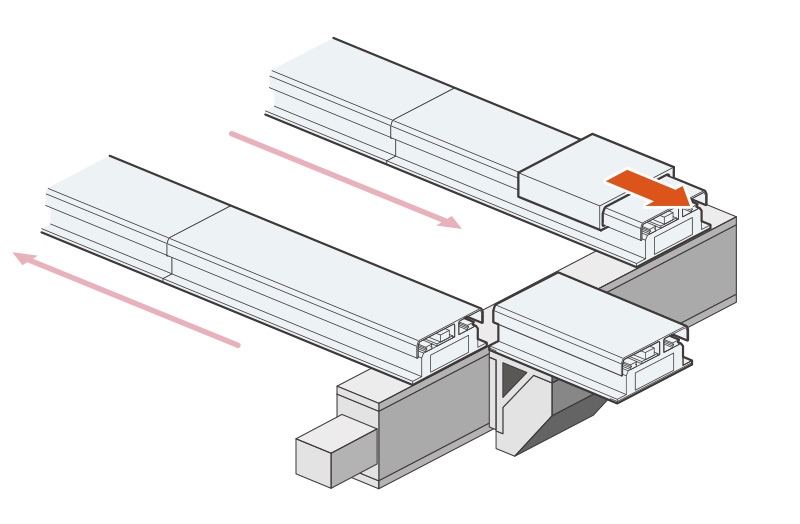
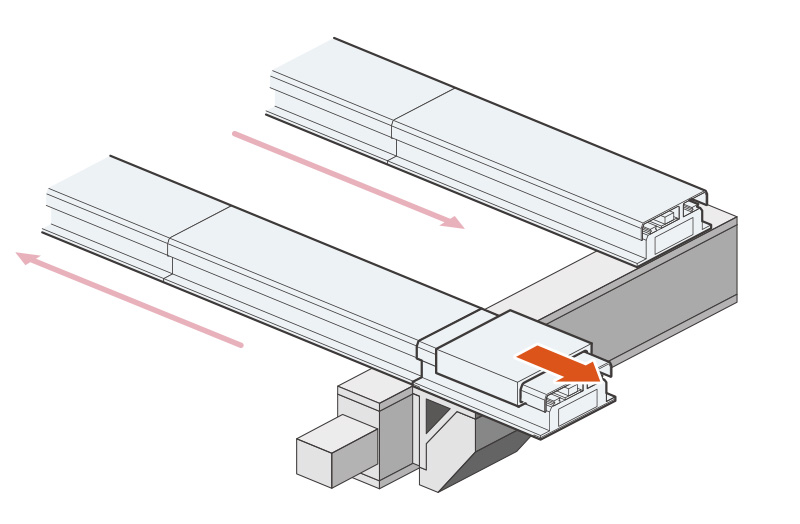
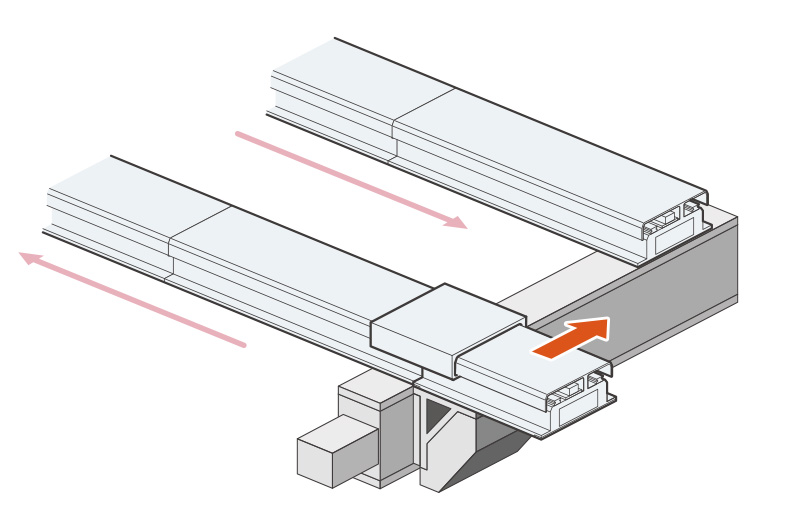
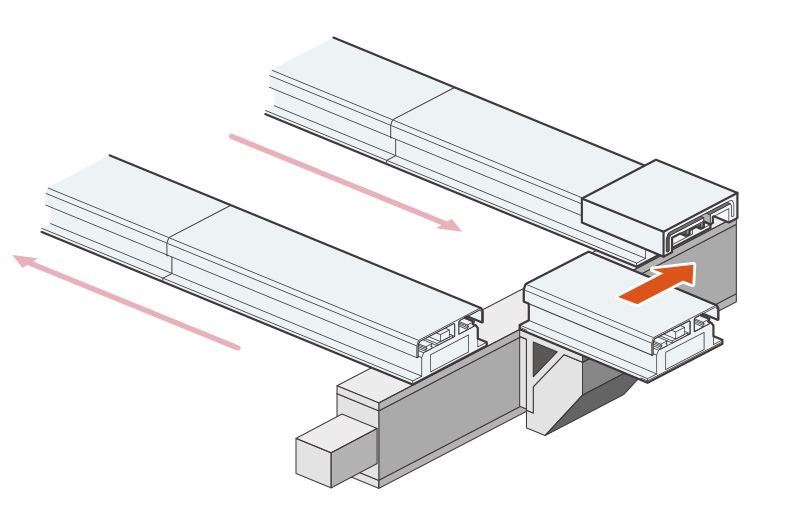
05循環部での破損に繋がる動作防止をサポート
パレットサイズをパラメータに登録することでスライダ動作可能領域が決定され、パレットやワークがスライダ全長より大きい場合でも循環異常動作が検出されます。これにより、循環部のスライダ乗り継ぎ事故を回避することができるため、より安全なソフト設計が可能となります。
06シンプルな直値動作とポイント指定移動が可能
ポイント指定について
- 合計:65,535ポイントまで動作パターンを指定可能
- 各ポイントごとに、位置・速度・加減速・公差などを指定
指定イメージ
| ポイント | 位置(mm) | 速度 | 加速度 | 減速度 | 公差(mm) |
|---|---|---|---|---|---|
| 1 | 100.000 | 1 | 0.5 | 1 | 0.01 |
| 2 | 800.000 | 0.5 | 1 | 1 | 0.05 |
| 3 | 432.562 | 1 | 1 | 1 | 0.02 |
| 4 | 1234.410 | 0.5 | 1 | 1 | 0.01 |
| 5 | 2451.400 | 1 | 1 | 1 | 0.01 |

リモートコマンド概要
| 入力 |
|---|
| 1. コマンド |
| 2. ポイント指定 |
| 3. 直値位置指定 |
- 1.
- サーボオン、原点復帰、移動、ジョグ、インチングなど
- 2.
- 使用するポイント番号
- 3.
- 直値指定をすると、速度・加速度などは2.の値を使用して位置だけ変更
| 出力 |
|---|
| 1. コマンド |
| 2. ポイント指定 |
| 3. 現在位置出力 |
- 1.
- サーボ状態、移動中、移動完了など
- 2.
- 移動中のポイント番号
- 3.
- 現在位置を常時出力.の値を使用して位置だけ変更
直値動作
スライダごとにポイントを割り当て、座標は直値で指定
スライダとポイントは1対1で対応
ポイントに座標値を入力

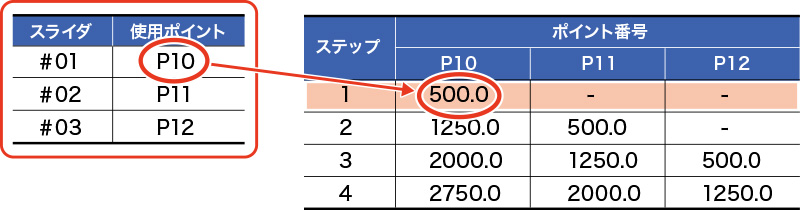
ポイント指定動作
各スライダごとに次に移動するポイント番号を指定

ポイント番号をスライダに割り当て

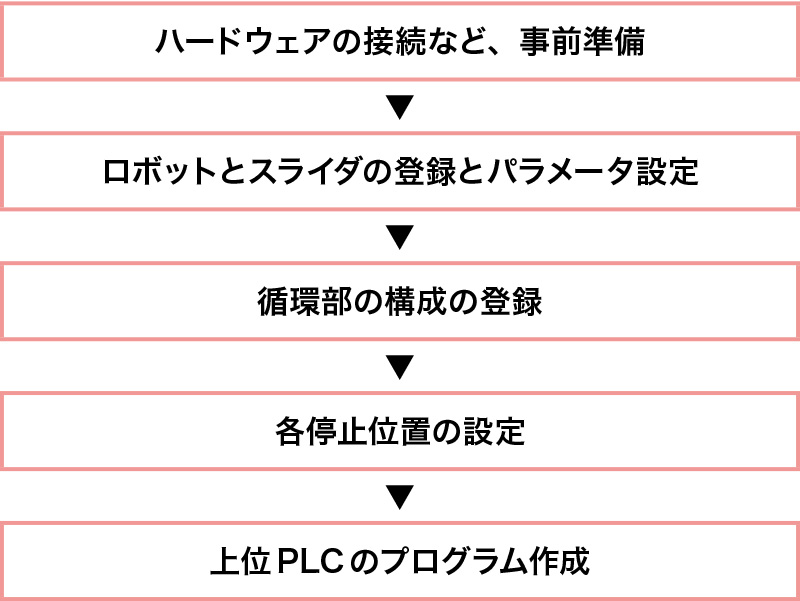
手順
スタンダードプロファイル仕様
| 使用可能コントローラ | YHX-HCU | |
|---|---|---|
| 運転方法 | ポイントトレースポイント番号指定位置決め、直値指定直接座標指定位置決め | |
| 対応ロボット | LCMR200、LCM-X、GXシリーズ (LCMR200とLCM-Xを混在させて制御することはできません) |
|
| インターフェース | YHX Studio、YHX-PP、フィールドネットワーク通信 | |
| 動作種類 | 絶対位置移動 | |
| 登録可能な最大ポイント数 | 65535 | |
| 制御軸数 (スライダと単軸ロボットの合計、 ただし、単軸ロボットは最大で16軸まで) |
EtherCAT | 64 |
| EtherNet/IP™ | 64 | |
| PROFINET | 64 | |
| CC-Link | 22 | |
| 主な入出力 その他の機能は取説をご確認ください。 |
全軸対象入力 | サーボオン/オフ切替/インターロック/アラームリセット |
| 全軸対象出力 | サーボ状態/インターロック状態/アラーム状態/ハートビート/非常停止状態 | |
| 個別軸対象入力 | サーボオン/オフ切替/原点復帰/制御範囲内での位置決め移動(LCMの乗継動作含む)/制御範囲外からのスライダ挿入準備/制御範囲外へのスライダ排出/ジョグ移動・インチング移動/移動停止 | |
| 個別軸対象出力 | サーボ状態/原点復帰状態/各種実行状態表示用専用出力 指定ポイント番号/現在位置/軸アラーム状態 |
|
| 主なリモートコマンド その他のリモートコマンドは取説をご参照ください。 |
設定データの書き込み、読み出し | |
| アラーム確認 | ||
| 積算走行距離、乗継回数の書き込み、読み出し | ||



YHXコントローラ
関連コンテンツ




ロボティクス事業部 営業統括部 FA営業部・CS部
〒433-8103 静岡県浜松市中央区豊岡町127番地
TEL:053-525-8350(営業)/ 053-525-8160(CS)
FAX:053-525-8378